This page is for the reader who wants the machinery. The implementation is clocks.inference.ParticleFilter — a few hundred lines, and everything below maps onto it directly.
State
\(N\) particles, each a full hypothesis for the unknown parameters (e.g. \((x, M)\) in 1D), with weights summing to one. Initialization draws the cloud from the prior — typically uniform over the position and mass ranges.
Update
Per observation, each particle’s log-weight gains the Gaussian log-likelihood of the observed rates given that particle’s predicted rates:
plus a log-prior that is \(-\infty\) outside the bounds (negative mass, position out of range) — invalid particles die instantly rather than being clamped. Normalization happens in log space (log-sum-exp), because with \(\sigma = 0.005\) the raw likelihoods underflow immediately.
Resampling
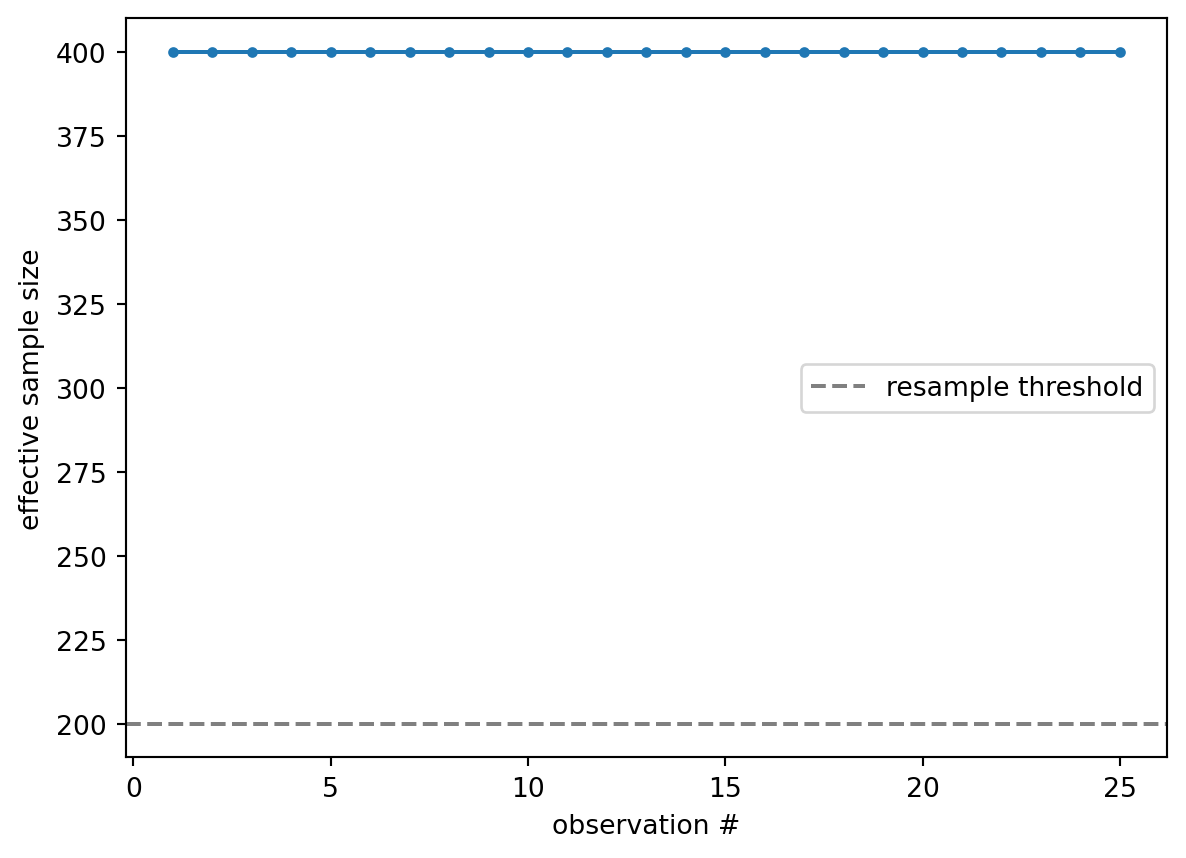
A few sharp observations leave most particles with negligible weight. The effective sample size\(\mathrm{ESS} = 1/\sum_i w_i^2\) measures the collapse; when it drops below resample_threshold · N, the filter redraws \(N\) particles in proportion to weight and perturbs the clones with jitter so they don’t sit on top of each other. Three resampling schemes are available: systematic (the default) walks one evenly-spaced comb with a single random offset through the cumulative weights, giving minimal variance; stratified draws one uniform sample per equal-probability stratum, trading a little variance for independence between strata; residual deterministically copies each particle \(\lfloor N w_i \rfloor\) times and only randomizes the remainder. Three jitter modes:
fixed — isotropic Gaussian noise with absolute scale jitter_std.
covariance — noise shaped by the weighted empirical covariance of the cloud, scaled by jitter_std. When the posterior is a thin diagonal ridge (a “banana”), isotropic jitter pushes particles off the ridge; covariance jitter slides them along it.
annealed (the default) — axis-aligned Gaussian whose per-parameter scale starts at the initial particle cloud’s spread (prior scale) and decays exponentially, with time constant jitter_tau observations (15, by default), to the jitter_std floor. Early on the cloud can still escape a wrong mode; late in the run the jitter is as gentle as fixed jitter.
The covariance mode has a guard worth knowing about: with fewer than two effective particles the weighted covariance is mathematically undefined (np.cov’s normalization \(1 - \sum w_i^2\) hits zero), so the filter falls back to isotropic jitter for that resample rather than crashing or freezing.
Evidence
Each update’s increment \(\log \sum_i w_i L_i\) is the marginal likelihood of that observation under the model — how well the model predicted the data before seeing it. Summed over observations this is the log-evidence, the quantity model comparison ranks.
Effective sample size over 25 observations. Sharp likelihoods crash it; resampling (below the dashed threshold) resets it to N.
WarningFailure modes
Three ways this machinery can lie to you, and what the library does about each:
Weight collapse. Every particle lands at \(-\infty\) log-weight (prior and data contradict). The filter raises RuntimeError instead of propagating NaN.
Particle impoverishment. After resampling, the cloud consists of near-identical clones; if the jitter is too weak the posterior freezes and reports false certainty. The six-parameter two-mass-2D problem shows this concretely: at a fixed jitter of jitter_std = 0.02, only 1/12 tuning seeds recovered truth. Annealing that same floor down from the prior scale (the jitter_tau = 15 default) let the cloud escape wrong modes early and settle late, recovering 12/12 tuning seeds and 11/12 on a held-out set of fresh seeds — which is why annealed jitter is now the library default.
Label switching. With multiple masses, the posterior is symmetric under relabeling; the sorting constraint breaks it, at a known cost near the sort boundary.